Watchout Inc. · Robotic part-picking
Knowing when a grasp is safe to attempt
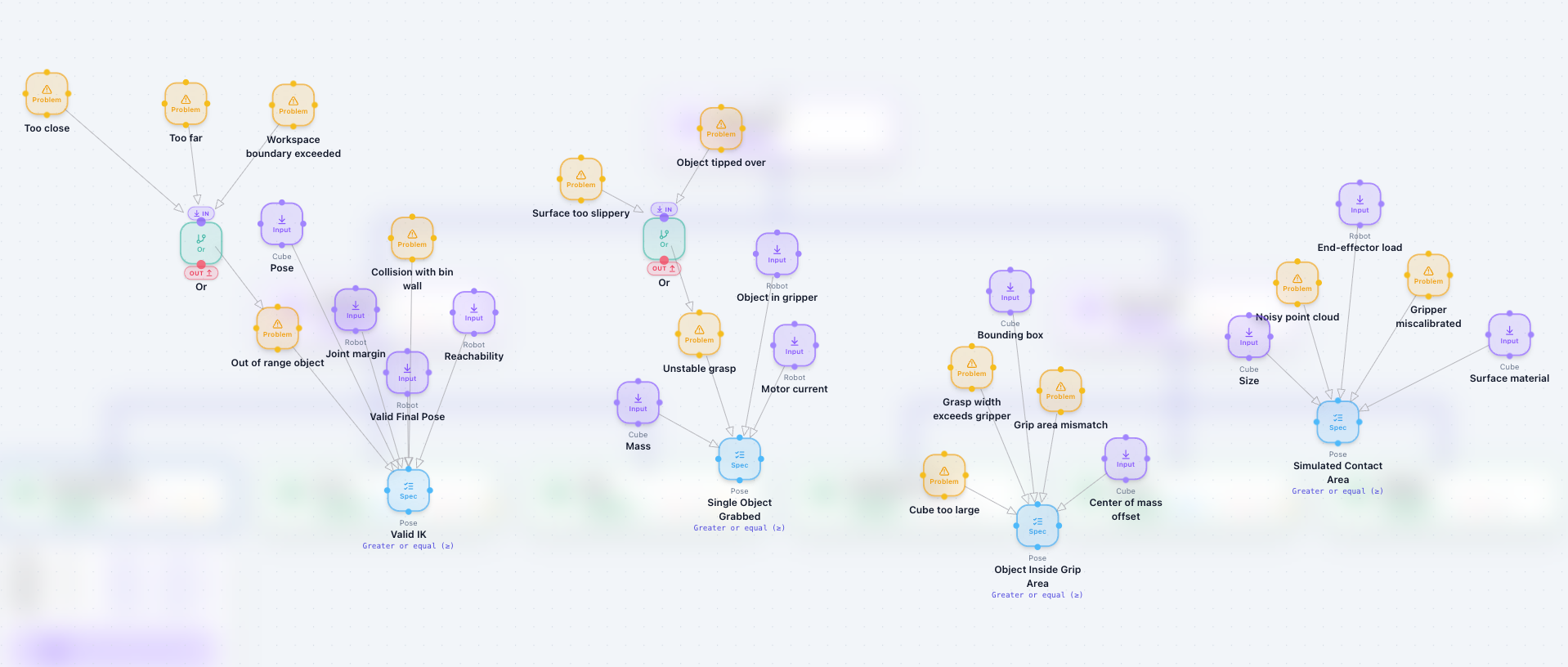
A find-grip-pose activity turns camera and depth signals into a belief about whether a proposed grasp will hold. The agent only commits when calibrated confidence clears the demanded threshold — and surfaces uncertain cases instead of risking a drop.
P ≥ θ
gate before every grasp
causal
physics-aware grip model